JCMs questions
 Jimbotini
Posts: 44
Jimbotini
Posts: 44
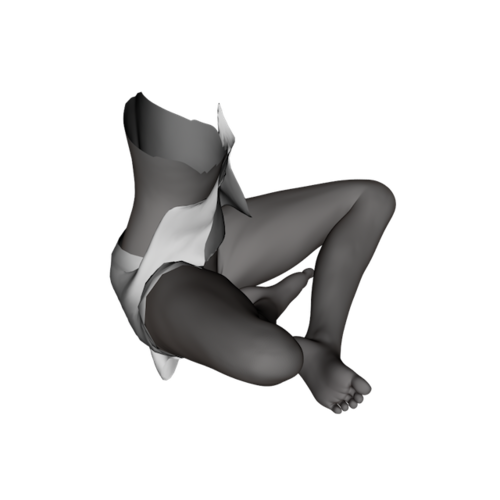
I have been learning about JCMs recently. I have seen how incredibly awesome they are. I love them. Using lightwave, I can take something like a skirt, lift a leg a certain way, use its cloth draping capabilities and load up its output as a JCM. Works great... except that things like a JCM for lifting the left leg forward and a separate one for the right leg forward over exaggerates the middle ground which makes sitting poses quite interesting (see the attached picture). Not quite the look I'm going for.
Here is the problem. I can create another morph that will correct the problem, but I need a combination of joints to trigger the morph. Something like if rThigh is lifted forward but lThigh is not, the morph should stay at 0. The morph should only be triggered if both are lifted and should be something like an average of them... or something. I can come up with the math required... I think... but am at a loss for how that should look when setting it up.
Here is what I've come up with for setting up a JCM in 4.6.
1. pose the figure (export skirt to modeler software, modify and save).
2. Edit -> Object -> Morph Loader Pro. "Reverse Deformations" changed to "Yes" and set name accordingly and accept.
3. Set the morph to limit from 0 -> 100%.
4. Parameters context menu -> Edit Mode and load up "Property Hierarchy". Have both windows showing.
5. Move the skirt to be parented to the figure (if not already).
6. With the skirt selected, grab the leg joint in the Property Hierarchy window. Drill down to the leg joint to attach the morph to. X,Y,Z rotation and drag the recently added morph to the rotation's 1st Stage Sub-Componenents.
7. Set the scalar attribute to be an inverse of the max number in the join rotation. (if it rotates to 50, the JCM's scalar attribute should be 1/50 with 6 digit precision)
8. change color of the morph, hide, move to a special JCM group... blah, blah as you see fit with standard frou-frou stuff which really matters after you hide it.
Daz 3D is part of 
Connect
DAZ Productions, Inc.
7533 S Center View Ct #4664
West Jordan, UT 84084
Licensing Agreement | Terms of Service | Privacy Policy | EULA
© 2025 Daz Productions Inc. All Rights Reserved.
Comments
What you need to do, if you create a correction morph, is add both rotations as controllers setting the second to multiply so that the morph doesn't kick in unless the values are both non-zero.
So I'm guessing this assuming I have a correction morph for each of the other 2 JCMs. I have a single morph to correct it when both JCMs are in play. I'll play around with it some more but I'm guessing I would link this as a multiply on both the joints and an addition on the morphs I'm correcting? I'm thinking I might need something more like a min value instead of a straight additive value from both.
What do the other types do? I assume DeltaAdd takes the controlling joint/morph and multiplies by the scale and adds that value to value dialed manually. What about subtract, add, keyed?